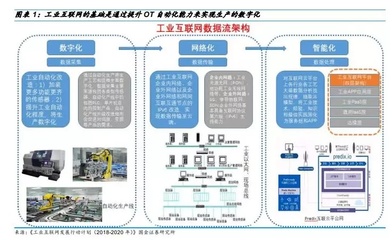
2020年,在全球數字經濟加速演進與我國“新基建”戰略深入實施的背景下,大數據產業作為核心驅動力,迎來了關鍵的發展階段。其中,工業互聯網數據服務作為大數據與實體經濟深度融合的典型領域,展現出巨大的潛力和價值,成為推動產業數字化、網絡化、智能化轉型的重要引擎。
一、2020年我國大數據產業發展的宏觀態勢
2020年,我國大數據產業在政策支持、技術創新、融合應用和生態構建等方面持續深化。國家層面,《關于構建更加完善的要素市場化配置體制機制的意見》首次將數據明確為新型生產要素,為數據價值化奠定了制度基礎。產業規模穩步增長,據相關機構測算,2020年我國大數據產業規模已超過萬億元人民幣。技術層面,大數據處理、分析、可視化及安全技術不斷突破,與人工智能、云計算、區塊鏈等新一代信息技術融合創新加速。應用層面,大數據從消費互聯網向政務、金融、醫療、工業等更廣泛的領域滲透,賦能作用日益凸顯。
二、工業互聯網數據服務的崛起與核心價值
工業互聯網數據服務,是大數據產業在工業領域的垂直深化。它通過采集、匯聚、處理、分析工業全要素、全產業鏈、全價值鏈的海量數據,實現數據的資產化、服務化和價值化。
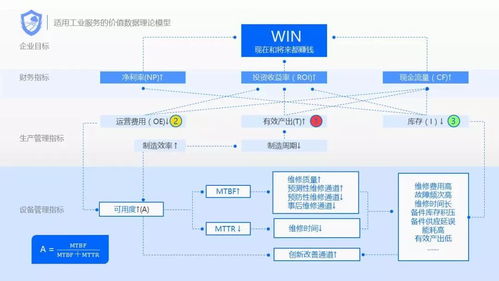
- 驅動智能制造:基于對設備運行、生產工藝、質量檢測等數據的實時分析與優化,實現生產過程的智能化管控、預測性維護和資源高效配置,提升生產效率和產品質量。
- 創新服務模式:催生了設備遠程運維、能源管理優化、供應鏈協同、產融結合等新型數據服務模式,推動制造業從單純產品出售向“產品+服務”的轉型。
- 賦能產業鏈協同:打通企業內外部數據孤島,促進研發設計、生產制造、經營管理、市場服務等環節的數據貫通與業務協同,提升產業鏈整體韌性和響應速度。
三、2020年工業互聯網數據服務的發展特征
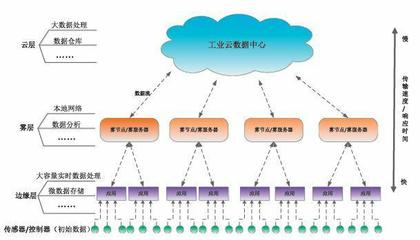
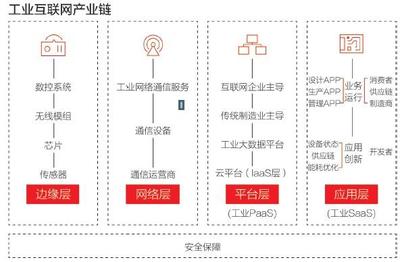
- 平臺成為核心載體:國家級、行業級、企業級工業互聯網平臺快速發展,成為匯聚工業數據、承載數據服務、培育工業APP的關鍵樞紐。平臺提供的各類數據模型、分析工具和微服務,降低了企業數據應用的門檻。
- 數據安全與流通備受關注:隨著工業數據量激增、價值密度提高,數據安全、權屬界定、隱私保護、跨主體流通與交易等問題成為制約發展的關鍵。2020年,相關政策標準的研究制定明顯提速。
- 融合應用場景不斷拓展:從單個設備的監控優化,擴展到生產線、車間、工廠乃至整個產業鏈的協同優化。特定行業(如鋼鐵、石化、工程機械等)的解決方案日益成熟,場景化、個性化特征顯著。
- 生態構建初具雛形:設備制造商、軟件服務商、工業自動化企業、電信運營商、互聯網平臺等各方力量積極布局,圍繞數據采集、平臺建設、應用開發、安全服務等環節,初步形成了協同創新的產業生態。
四、面臨的挑戰與未來展望
盡管發展迅速,工業互聯網數據服務仍面臨數據采集質量不高、標準化程度不足、復合型人才短缺、商業模式有待清晰、數據安全治理體系尚不完善等挑戰。
工業互聯網數據服務的發展將呈現以下趨勢:一是技術融合將進一步深化,邊緣計算、數字孿生、知識圖譜等技術與數據服務的結合將催生更智能的解決方案;二是數據要素的市場化配置進程將加速,數據確權、定價、交易機制探索將取得實質性進展;三是行業應用將更加深入,從“可見”走向“可優”,實現更深層次的業務優化與模式創新;四是安全可信的數據空間建設將成為重點,保障數據在安全可控的前提下實現價值最大化。
2020年是我國大數據產業向縱深發展的一年,而工業互聯網數據服務作為其與實體經濟結合最緊密、價值釋放最直接的領域之一,正步入發展的快車道。在政策引導、技術驅動和市場需求的共同作用下,工業互聯網數據服務將持續為制造業高質量發展注入強大數據動能,成為數字經濟時代重塑工業競爭力的關鍵支撐。